Ang mga gripper mahimong bahinon sa daghang mga klase, lakip ang electric ug pneumatic.Busa, unsa ang kalainan tali sa mga electric grippers ug pneumatic grippers?
1: Unsa ang usa ka pang-industriya nga gripper?
Ang mga pang-industriya nga gripper nailhan usab nga mekanikal nga mga mekanismo sa gripper.Ang mekanismo sa robot gripper gidisenyo sumala sa aktuwal nga mga kinahanglanon sa trabaho ug adunay lainlaing mga porma.
Ang mekanikal nga grippers kasagaran duha ka tudlo grippers, nga gihulagway pinaagi sa motion, gripping ug mekanismo kabtangan.Sunod, hisgotan nato ang pipila ka importanteng aspeto.Ang usa mao ang pneumatic end clamping nga mekanismo, nga gihulagway sa kusog kaayo nga tulin sa aksyon, ang fluidity naggikan sa hydraulic system, medyo gamay nga pagkawala sa presyur, ug angay alang sa layo nga kontrol.Ang ikaduha mao ang suction end clamping mechanism, nga naggamit sa suction force sa suction cup aron mapalihok ang butang.Kini mao ang nag-una nga angay alang sa mga butang uban sa usa ka kasarangan nga pagtaas sa panagway ratio ug gibag-on, sama sa bildo, lang papel, ug uban pa Ang usa mao ang usa ka hydraulic katapusan clamp mekanismo nga clamps mga butang pinaagi sa hydraulic clamping ug tingpamulak release.Apan, sa katapusan sa adlaw, ang mga kuko sa mga robot sa industriya makatabang kanato sa paghimo sa atong mga trabaho nga mas maayo.
2. Ang kalainan tali sa electric gripper ug pneumatic gripper
Kung itandi sa mga pneumatic grippers, ang aplikasyon sa mga electric grippers sa natad sa automation sa industriya adunay mga musunud nga kinaiya:
1), ang tipo sa de-koryenteng motor adunay mekanismo sa pag-lock sa kaugalingon, nga makapugong sa mga kagamitan sa workpiece nga madaot sa pagkapakyas sa kuryente.Kung itandi sa pneumatic grippers, kini mas luwas;
2), ang electric gripper adunay usa ka programmable control function aron makab-ot ang multi-point positioning.Ang pneumatic grippers adunay duha lang ka stop, samtang ang electric grippers mahimong adunay labaw sa 256 stops.Ang acceleration ug deceleration sa electric finger mahimong makontrol aron maminusan ang epekto sa workpiece.
3), ang electric gripper usa ka flexible gripper nga makab-ot ang tukma nga pagkontrol sa puwersa, samtang ang pneumatic gripper usa ka proseso nga nag-oscillating.Sa prinsipyo, adunay oscillation, nga lisud wagtangon.Ang clamping force sa electric gripper mahimong ma-adjust aron maamgohan ang closed-loop force control.Ang katukma sa clamping force mahimong moabot sa 0.01N, ug ang katukma sa pagsukod mahimong moabot sa 0.005mm.Ang kalig-on ug katulin sa pneumatic grippers sa batakan dili makontrol, mao nga dili kini magamit alang sa maayong trabaho nga adunay taas nga pagka-flexible.
4), ang gidaghanon sa electric gripper mas gamay kaysa sa pneumatic gripper.Kini usab sayon kaayo nga i-install.Simple ra ang pagmentinar.
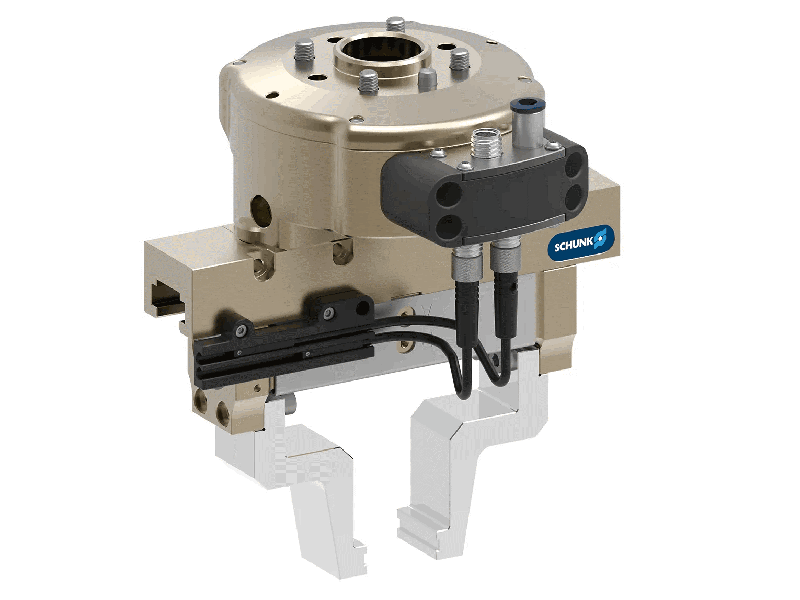
pneumatic gripper
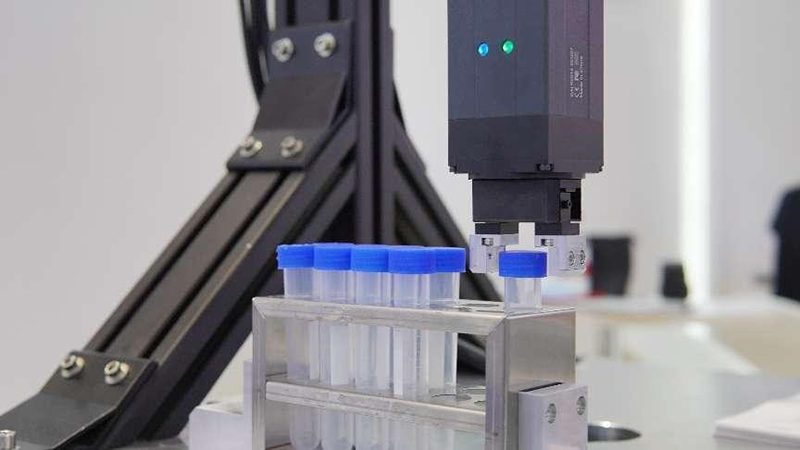 Electric Gripper
Electric Gripper
3. Mga bentaha sa electric gripper
1. Kontrola ang posisyon sa mga apapangig
Ang posisyon sa mga apapangig mahimong matino pinaagi sa paggamit sa usa ka naka-encode nga motor ug usa ka angay nga pamaagi sa pagkontrol.Sa kasukwahi, uban sa tradisyonal nga mga apapangig, kasagaran gikinahanglan nga huptan ang tibuok nga stroke.Kung mogamit mga electric grippers, gamita lamang ang gikinahanglan nga clearance nga duol sa bahin ug dayon paminusan ang pagbiyahe.Ang mga switch sa bahin nagpadali sa pagpili sa usa ka mas lapad nga gidak-on sa mga bahin nga wala ikompromiso ang mga oras sa siklo sa produksiyon.
2. Kontrola ang pagkupot ug katulin
Tungod kay ang motor nga kasamtangan direkta nga proporsyonal sa gigamit nga torque, posible nga makontrol ang gigamit nga puwersa sa pagkupot.Ang sama nga moadto alang sa closing speed.Pananglitan, kini makatabang sa mga mahuyang nga mga bahin.
Oras sa pag-post: Dis-19-2022